Site map of:
E = γmc2
I2 = (ct)2 – x2 = (ct´)2 – x´2 =…
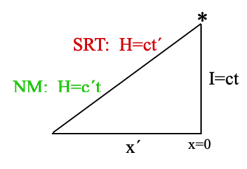
NM: Vwrt x=0 = (x´/t) = (x´/I)c
SRT: vwrt x=0=(x´/t´)=(x´/H)c
NM: Vwrt* = (H/t) = (c´t)/t = c´
SRT: vwrt * = (H/t´) = (ct´/t´) = c
Abstract
Collision problems are often discussed in terms of momentum (P) and kinetic energy, either K=(γ–1)mc2 for Special Relativity Theory (SRT) or K=(½)mV2 for Newtonian Mechanics (NM). However, collision problems can be solved using only momentum (P) and mass (m) and ignoring ‘kinetic energy’. By doing this, the equations are the same in SRT as in NM.
Also shown is that SRT kinetic energy is characteristically not conserved in elastic collisions.
Solving Collisions without Kinetic Energy
In one dimension, a ‘collision’ is the result of the application of a force in equal and opposite directions on two objects, m1 and m2 , which are moving at P1/m1 and P2/m2 respectively for a period of time t , coming closer together, until both objects are moving together at
P3/(m1+m2) = (P1+P2)/(m1+m2).
Change of momentum of free objects is the result of a force (F) acting for a time (t) , i.e., dP=Fdt . It can be a small force acting over a long time or a large force acting over a correspondingly short time. The force causes momentum added to one object to be subtracted from the other until they are both moving at the same speed with respect to the observer and not moving with respect to each other at collision. The total momentum P1+P2 remains constant. If the ‘collision’ is inelastic, that is the final stage. They have each lost all their kinetic energy and velocity relative to each other and to some reference frame, called the center of momentum reference frame, and travel together at the same speed in other reference frames.
If the same amount of momentum change dP=Fdt is again applied, they will wind up moving away from each other. If a perfectly elastic collision, the objects, which started out moving at
((P1/m1) – (P2/m2)) = S
with respect to each other, will wind up at
[(P2/m1) – (P5/m2)] = (–)[(P1/m1) – (P2/m2)] = (–) S
moving away from each other where P2 and P5 are the new after collision momenta of the first and second objects, respectively. Let
P1 + P2 = PT ,
((P1/m1) – (P2/m2)) = S
m1 + m2 = mT .
If S is positive, (the positive direction is from m1 to m2 ) the objects are moving toward each other to collision. If S is negative, they are moving apart. The first object that was formerly moving at (P1/m1) will now be moving at
(P2/m1) = (PT – m2S) / mT = [P1(1 – (m2/m1)) + 2P2] / (m1 + m2)
and the second object, formerly moving at (P2/m2) , will now be moving at
(P5/m2) = (PT + m1S) / mT = [P2(1 – (m11/m2)) + 2P1] / (m1 + m2)
or, more easily,
(P5/m2) = (P2/m1) + S
Now
(P2/m1) – (P5/m2) = (–) [(P1/m1) – (P2/m2)].
Actually, both momenta are not needed to solve the collision problem. All that is needed is the value of S and the value of the two masses, in which case PT= 0 and the calculations are for a center of momentum reference frame.. Then you can pick any value for one initial momentum and calculate the needed value of the other.
P2 = m2((P1/m1) – S) .
P1 = m1((P2/m2) + S)
If the two momenta are not equal and opposite, i.e. P1+P2≠0 , it means that the approach to collision is being observed and measured from a non-center-of-momentum reference frame. However,
P1 = – P2 = m1m2S / mT
will give the values for observing from a center of momentum reference frame where P1+P2=0 .
Any number (including negative) can be added to both (P1/m1) and (P2/m2) . It will represent an observer moving at a different speed relative to the objects that are colliding.
This full analysis of elastic and inelastic collisions has been done using only the concepts of mass m and momentum P and the results are the same for both SR and NM, keeping in mind that (P/m)=V in NM and γv in SRT. (The SRT velocity, v , and the NM velocity, V , are never the same but are related by V=γv .) Kinetic energy concepts were not used.
Kinetic Energy in SRT Collisions
However, the usual way to examine collisions is to say that, in elastic collisions, both momentum and kinetic energy, K=½ mV2 in NM and KR=mc2(γ – 1) in SRT, are conserved. This works easily for NM where the kinetic energy lost in the objects coming to a stop relative to each other is said to be converted to ‘potential energy’ which is available to restore the objects to the same speed relative to each other but in the opposite direction. Using the methods above for NM, kinetic energy will be found to be conserved.
However, in SRT, while momentum P is also conserved, kinetic energy, KR=mc2(γ – 1) (Relativistic kinetic energy) will not generally be conserved in a collision, i.e., in general
K1 + K2 ≠ K2 + K5
In SRT, momentum P is conserved. The following is the equation P1+P2=P2+P5 divided by the constant c
m1 [ (P/mc)1 – (P/mc)2 ]= m2 [ (P/mc)5 – (P/mc)2 ] .
This can also be written in the unusual form
m1[ ((P/mc)12)1/2 – ((P/mc)22)1/2 ] = m2 [ ((P/mc)52)1/2 – ((P/mc)22)1/2 ] .
Any number added to or subtracted from each of the above four terms would not affect the equation’s equality.
Relativistic potential energy KR , which is claimed to be conserved, can also be written in terms of mass and momentum, P=mγv . Relating γ to m and P ,
γ 2 = 1/(1 – (v/c)2 ) ; γ2 – γ2(v/c)2 = 1 ; γ2 = (P/mc)2 + 1
Thus, the formula for Relativistic kinetic energy KR=mc2(γ– 1) can be written
KR/c2 = m [((P/mc)2 + 1)1/2 – 1] .
So, if Relativistic kinetic energy is conserved
K1/c2 – K2/c2 = K5/c2 – K2/c2
and therefore
m1 [((P/mc)12 + 1)1/2 – ((P/mc)22 + 1)1/2 ] ?=? m2 [((P/mc)52 + 1)1/2 – ((P/mc)22 + 1)1/2 ]
where the “ –1’s “ have canceled out, must also be true.
This kinetic energy equation is the same as the correct ‘momentum conservation’ equation above, i.e., (m1[ ((P/mc)12)1/2 – …) , except for the “ +1 “ in the square root terms. If the “ +1 “ added the same amount to each term, the equation would still balance, but it doesn’t. If there are four different numeric values for the variables m1, m2, P1, P2, then P2 and P5 will be different from P1 and P2 . This will result in a different amount being added to each of the four correct ((P/mc)2)½ terms (equivalent to P/mc ) and will make the two sides of the K1–K2=K5–K2 equation unequal, demonstrating that SRT kinetic energy is generally not conserved.
However, there are three instances in which the SRT kinetic energy equation will be correct. If m1 equals m2 , V2=V2 and V5=V1 , resulting in equal additions to both sides. If P1 + P2 = 0 , this also occurs. The third instance is when P1 or P2 = zero. This occurs when one of the masses is fixed in place in a reference frame. Since the moving object will simply reverse course at the same speed, the before and after Kr’s will be equal. Other than these three instances, the SRT kinetic energy equation does not balance and is therefore inaccurate.
Some have tried changing masses to make the equation balance but the problem with that is that the mass corrections change for different observers moving at different speeds relative to the colliding masses.
Summary
Collision problems can be solved using only momentum P and mass m without invoking kinetic energy. The problems will work out the same in NM and SRT because momentum and mass (rest mass if you prefer) are numerically the same in both SR and NM. In NM, P=mV and in SRT P=mγv . Thus, V=γv and (V/c)=γ(v/c) .
In elastic collisions, kinetic energy is conserved in NM. In SRT, kinetic energy KR=mc2(γ – 1) is conserved only in three instances: a center of momentum reference frame (i.e., P1+P2=0 ), when the colliding masses are equal (m1=m2) , or one object does not change momentum as the result of the collision, such as by being fixed in place in its reference frame.
Kinetic Energy is Characteristically
Not Conserved in Special Relativity (SRT)
Elastic Collisions
Dr. Sherwood Kaip
El Paso, TX
<skaip799@gmail.com>; cell: 1 (915) 309-6340
This material may be reproduced if author attribution is given.
To return from PRINT page, click "back" arrow on your browser